Hanna ZhangI am a Graduate Technology Intern at Disney Research within Walt Disney Imagineering, where I work on next generation performing stunt robots. Prior to Disney, I finshed my Masters in Computer Science at the University of Toronto under Jessica Burgner-Kahrs. There I worked on convex relaxation-based solving techniques for continuum robot inverse kinematics. I have a Bachelors of Applied Science in Engineering Science majoring in Robotics minoring in Bioengineering from University of Toronto. Email / GitHub / Google Scholar / LinkedIn / CV |

|
ResearchI'm interested in control and planning for robots. |
|
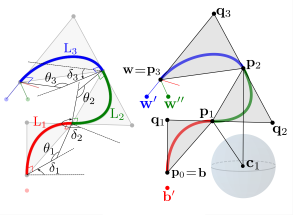
CIDGIKc: Distance-Geometric Inverse Kinematics for Continuum RobotsHanna Jiamei Zhang, Matthew Giamou, Filip Marić, Jonathan Kelly, Jessica Burgner-Kahrs IEEE Robotics and Automation Letters (RAL), 2023 paper / arxiv / code / We present CIDGIKc (Convex Iteration for Distance-Geometric Inverse Kinematics for Continuum Robots), an algorithm that solves these nonconvex feasibility problems with a sequence of semidefinite programs whose objectives are designed to encourage low-rank minimizers. CIDGIKc is enabled by a novel distance-geometric parameterization of constant curvature segment geometry for CRs with extensible segments. |
|
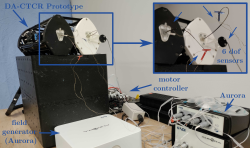
Cooperative Control of Dual-Arm Concentric Tube Continuum RobotsHanna Jiamei Zhang, Sven Lilge, M. Taha Chikhaoui, Jessica Burgner-Kahrs IEEE 2022 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2022 paper / slides / Many real-world tasks often require collaboration of multiple manipulators necessitating dual-arm (DA) robotic systems. Leveraging the benefits of CTCRs in a dual-arm configuration, i.e. DA-CTCR, has great potential for applications in such areas. A hierarchy-based control framework is proposed to efficiently control and coordinate motions in a semi-autonomous manner for DACTCRs. This framework is validated in various assistive/motion coordination control schemes in simulation and on a real-robot prototype. |
|
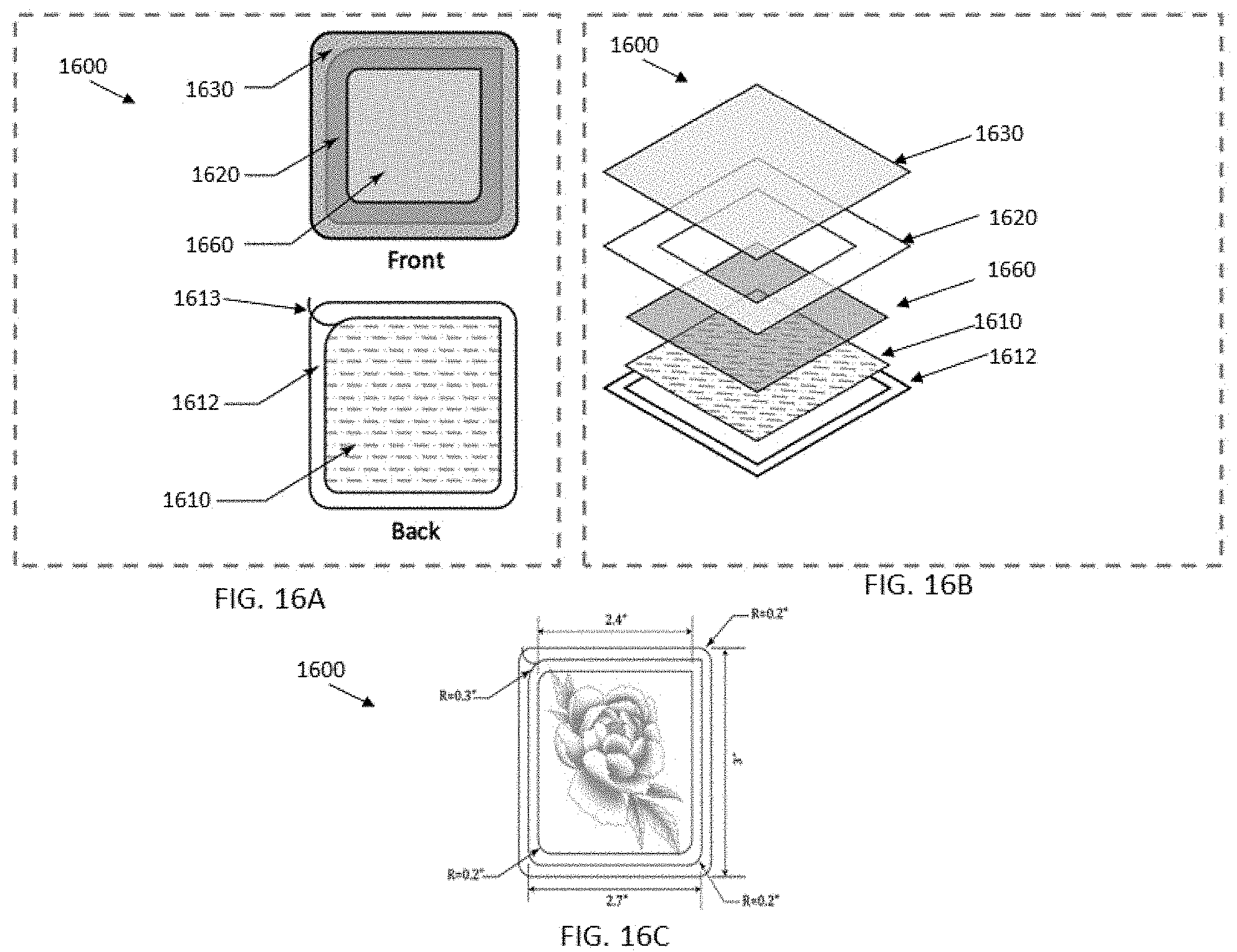
Semi-permanent tattoos, patent for novel application technology, semi-permanent ink, and manufacturing processTyler Handley, Betty Yu ,Sunny Deng ,Jobey Chua, Nazanin Khalili, Motaz Adam, Hanna Jiamei Zhang, Christopher Caputo United States Patent Office and Inkbox Inc, 2020 This patent relates to semi-permanent tattoos, and more particularly to genipin-based ink compositions as well as layered adhesive articles and methods for application of the genipin-based, semi-permanent tattoos. This encompasses work I did as a year long research team intern at Inkbox Inc. |
Technical ProjectsHere is a collection of interesting projects I've worked on. |
|
|
Towards Improved Modelling and Classification of Mobile-Recorded Cough Audio for Diagnosis of Respiratory Conditions: A Generative Model Approachprojects 2022-09-01 With 2 fellow graduate students I evaluated the ability of our conditioned generative model to produce wet or dry and female or male coughs by running statistical tests on the differences in MFCCs (Mel-frequency Cepstral Coefficients), a standard audio feature metric, and model embedding on generated coughs. |

|
Linear-Time Dynamics using Lagrange Multipliersprojects 2021-09-01 code / writeup / Worked with a fellow student to implement David Baraff’s 1996 work on Linear-Time Dynamics using Lagrange Multipliers in MATLAB. Results are demonstrated on 2D serially jointed structures, trees, and closed-loop chain structures. The dynamics of these systems are handled by 3 Different methods 1) standard matrix inversion, 2) a sparse O(n) factorization method, and a 3) dense \textit{O(n$^3$)} factorization method. Comparisons of the performance of these different solvers on the aforementioned systems at varying scales (i.e. size of the structures) were done. |
|
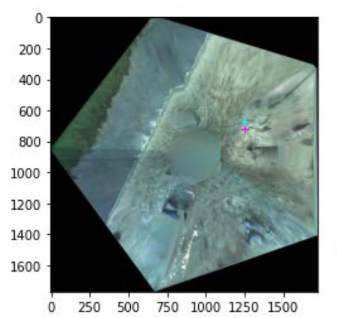
Generation of a Combined Bird’s Eye View of a Region around a Robotic Rover From Omnidirectional Stereo Imagesprojects 2020-12-01 code / writeup / Generated meaningful bird’s eye view images from 360\textdegree omnidirectional images taken on a small robotic rover travelling along a path through simulated Mars/Moon terrain. Reconstructed a flat orthographic map of a region around the rover at a particular time point using omnidirectional images and 3-D point clouds of the terrain. Corrected for variable auto-exposure of the multiple cameras (due to sun position) to improve the readability of that image. |
LeadershipSome opportunities I got to organize and lead meaningful causes and events. |
|
Vice Chair Operations: University of Toronto Engineering Orientation Committeeleadership 2022-09-01 Led a team of over 400 volunteers to deliver a week of online welcoming activities as well as some in-person programming for over 1000 incoming first-year engineering students, with a budget over $130k. Adapted/re-conceptualized Orientation activities which included new initiatives to encourage community engagement, make it easy for people to make genuine connections with one another, and offer a memorable, positive welcome into their first year of university. Oversaw the assembly/shipping/delivery logistics of 800+ U of T Engineering kits with swag, hosted international in-person meetups complying with safety regulations under COVID-19, ran online outreach/social initiatives, organized online study communities, and supported the re-design of orientation leader training. |
|
Design and source code from Jon Barron's website |